
Acoustic sensing with technical support had been introduced into warfare during the First World War. The British were early adopters of sound ranging to detect artillery batteries, used it much during the Second World War and they are still using acoustic ranging equipment for this purpose. This isn't expensive (except in personnel), but such a dedicated system is rather difficult to use in mobile warfare, similar to radio triangulation equipment.
Nowadays the much more accurate artillery radars can cope with the demand for artillery and mortar locating much better, albeit with the disadvantages of much higher purchase prices and treacherous radio emissions.
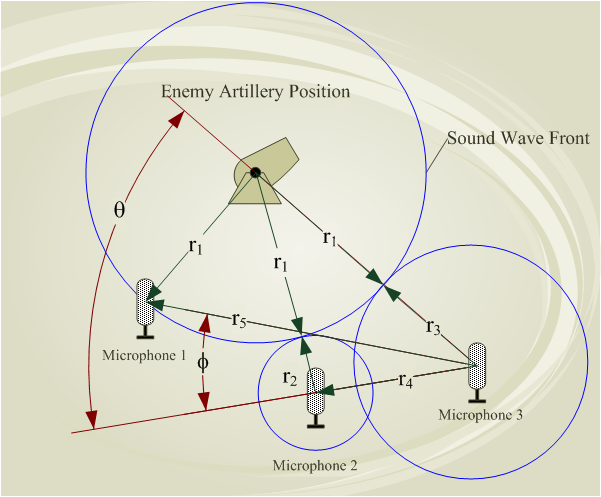 |
| Basic sound ranging operation |
It appears that after many decades with little improvement other than the use of electronic computing, the Microflown acoustic sensor (which is no microphone) may actually have brought substantial improvement to artillery sound ranging. A small sensor package with multiple Microflown sensors can apparently not only register the time of a sound event, but also the bearing - allowing for triangulation as with radio waves (instead of using the time difference of the sound arriving at spaced microphones as shown above). The applications for this kind of sensor are numerous.
A modern application for acoustic sensors has been the use for sniper (and more generally firearms) detection, I wrote about this a bit more in 2009. Most such systems appear to rely on the supersonic crack sound caused by a sniper bullet, rather than the muzzle blast's noise.
 |
| typical sniper detection microphone array |
A third - once quite important - use of acoustic sensing was the detection of aircraft through clouds with ground-based sound amplifiers. These grew to ridiculous proportions quickly.



I'm sure the relief brought by radars was great.
Why am I writing about all this acoustics stuff?
Well, there's one application that doesn't seem to be widely known; a non-line of sight detection of helicopters with ranges of about 8-10 km. The only published device for this that I found is the Israeli HELISPOT. It was available in Mk 2 version back in 1993 already, and apparently Mk 3 around 2003. So it's not brand new.
Range claims go up to 25 km in optimal conditions, and apparently the Israelis have or had a second system of this kind as well (source).
I think this is quite interesting, because when you think of networked warfare with no radio comm outage and you have microphones and acoustic sensors in many places, you probably don't even need any such dedicated devices. I'm certainly no sound or electrical engineer, but I suppose microphones mounted on vehicles for one purpose (such as sniper detection) could also be used for other purposes (such as early warning about helicopters), and this coupled with automated accurate navigation and radio datalinks may create a network of acoustic sensors that serves artillery detection, mortar detection, moving tank detection, helicopter detection and sniper/rifleman detection alike.
The network may break down if either navigation or communication breaks down, but with the right technology even a mere three vehicles with acoustic sensors in a 200 x 200 m area might suffice to accomplish such detections, and you can usually maintain radio comm over such distances and navigation (or at least bearings and distances between vehicles + heading of the vehicles) isn't much of a problem unless the vehicles are moving.
 Now combine this with another entirely passive warning device against aerial threats, such as the classic AD/AD or its de facto successor Rheinmetall FIRST* and you have a foundation for battlefield air defences that's impervious to classic, counter-Radar focused suppression of enemy air defences (SEAD). Now add a missile such as Bolide (RBS70NG) that's extremely hard to counter (laser beam rider) and cheap and the outcome is a battlefield short range air defence that keeps manned aerial threats at a respectful distance (~ 5 km) at most times.
Now combine this with another entirely passive warning device against aerial threats, such as the classic AD/AD or its de facto successor Rheinmetall FIRST* and you have a foundation for battlefield air defences that's impervious to classic, counter-Radar focused suppression of enemy air defences (SEAD). Now add a missile such as Bolide (RBS70NG) that's extremely hard to counter (laser beam rider) and cheap and the outcome is a battlefield short range air defence that keeps manned aerial threats at a respectful distance (~ 5 km) at most times.
Furthermore, all the warnings can be transmitted to the troops on the ground by radio. Modern tactical radios often have satellite navigation (GPS, Galileo) integrated, and could receive miniaturised inertial navigation systems to bridge the times of satellite navigation unavailability. The endangered troops could thus be warned about the nature of threat (jet, drone, helicopter, tank, even sniper) and the direction and would be able to minimise their exposure by exploiting concealment against that direction - or set up an ambush.**
This doesn't even require them to report their location into the radio network. The software-define radio would rather run an app that listens to all warning messages, knows the own position and alerts acoustically only if the threat is relevant to the radio's user. This wouldn't work at all times, but sure would be welcomed as helpful whenever it works.
The end result is a serious degradation of effectiveness of attack helicopters and SEAD in particular. Tank, combat aircraft and helicopters would have a harder time generating surprise. All sensed threats but those out of range would see their survivability degraded by such sensors and communications against which they can hardly do anything.
S O
defence_and_freedom@gmx.de
.
*: "Other IRST concepts were created for air defence purposes, such as ADAD in the United Kingdom, ANSAR-8 in the United States, VAMPIR in France, IRS-700 in Sweden, SPIRTAS in Israel and IRSCAN in the Netherlands". Source
**: The same approach to warning troops can be applied to incoming artillery and mortar ammunitions: Artillery locating radars may calculate the point of impact of ballistic projectiles a minute or more (other times mere seconds) before impact. This data may be used to send a area-related impact warning, so troops can take cover or get out of the targeted area, denying the surprise effect if not even the entire lethality to the attacker.
WW2 militarys came to the conclusion that acoustic sensors were good at determining direction, but little else about the aircraft (distance, altitude, etc). Sound ranging was more useful for counter-battery work, though. If a set of microphones were located 1000 yards away from a gun battery, they could locate its position within an error of 100 yards. Definitely not as good as radar CB.
ReplyDeleteExcellent entry. A couple of years ago I also thought and likely wrote* about using the vehicle-mounted existing hardware for "counter-sniping" to detect rockets launchers, mortars and artillery in fashion of WWII acoustic counter-battery systems.
ReplyDeleteMicroflow is however totally new for me and it is rather amazing which level of miniaturisation is achievable.
Muzzle blast and shell burst are obviously singular events with specific signatures and were thus processable by WWI tech but needed widely distributed sensors. On the other hand the sound created by a object/projectile moving through a medium, in this case air, does continously emit. Vastly more data is incoming but without the proper setup, computing power and algorithms it's just noise. Small arms fire offers of course a greater chance to combine data from those two sources then long-range artillery.
Stated that, the shock waves of a supersonic rocket, shell, missile or bomb should be trackable from quite a range with a high degree of accuracy given a couple of precisely located and networked microflown arrays.°
Much more could be said but I leave it there for now. The most interesting bit follows under°
Firn
°A creative way to improve the accuracy of INS after GPS and radio jamming might be to simply use sound emission. Just take your INS reading and transmit it's numbers frequency-encoded to your neighbours microphones.
Obviously it could be a smart way to communicate short bits between vehicles not too close to the enemy. Just dial up the energy in a readily air-absorbable frequency band in which you send an audio code, wait for the audio response and then send your stuff. Of course some directional sound muffling would also be feasible, if more expensive.
A bit like the old signal horns of old, just making use of the new ears of war.
*Have still to find it though...
I just wanted to add a couple of points:
Deletei) With a fairly air-absorbable frequency band I meant of course ultrasound, to avoid conflict with human hearing. A higher frequency allows a higher information flow yet range must be sufficient. It can be rather easily regulated by energy and frequency shift.
ii) The basic idea of audio communications is obviously so old and widely known, however without microphones on all vehicles and the wide availability of the much more useful radio comm. it was a moot point.
iii) In theory language input could also be encoded, shifted into ultrasound and also sent to individuals, decoded and put out as language.
iv) The idea was about short-range communication which can`t be overheard from a longer distance. Thus no infrasound.
Firn
P.S: Nothing is unjammable, some bats and moths have evolved a surprising degree of sophistication.
Ultrasound has a VERY short range in air.
DeleteThat's to a large degree the point. It's meant as a mean to communicate at most up to two hundred meters around a vehicle, often less. It is obviously no substitution to the electromagnetic spectrum or lower sound frequencies, but a way to share information across a unit for example, partially by relaying without having to use radio.
ReplyDeleteOverall the detection and geo-location of sound sources across the whole spectrum is of far greater interest and adds another dimension.
Firn
P.S: https://pubs.usgs.gov/of/2014/1253/downloads/OFR2014-1253.pdf
Ultrasound covers a wide range, but attenuation in air is awful. Ultrasound communication my become useful for divers, but in the air it's not promising.
DeleteBats' sonars are at 30 kHz to 80 kHz and achieve ranges of at most a few dozen metres. The ultrasound attenuation at higher frequencies can be so bad that the signal is undetectable after a few centimetres.
Im the near-acoustic range according to non-scientific research 'silent' dog whistles can cover two hundred meters or more. It does of course also depend on the speaker's output.
DeleteLower frequencies like those generated by mortars or artillery seem to need wider sensor spacing for better geolocation. Makes of course physical sense.
See the Microflown website:
-----------------------------
4. How does an AVS and an array of sound pressure transducers differ in obtaining directional information?
In order to obtain the directional information of a sound source, at least two microphones are required, placed at a certain intermediate distance. Human beings obtain acoustic directional information using both their ears, measuring the delay in the time of arrival on the sensor. This concept of only capturing phase information has been industrialized using a larger number of sound pressure transducers. The intermediate distance between the microphones determines the optimal frequency where sound sources can be detected. A high frequency event like a sniper shot requires a relatively compact array of sound pressure transducers with a main dimension of 50 centimeters. A very low frequency event like a mortar blast however requires an array intermediate distances of around 50 meters!
Whereas any sheer sound pressure based array is optimized for the detection of a certain kind of acoustic event, AVS are simply covering the entire audio band width, making them really broad banded. AVS capture both the phase and amplitude information of the sound field.
--------------------
Firn